Abstract
We present a novel method that allows for simultaneous geometric and radiometric calibration of a projector-camera pair. It is simple and does not require specialized hardware. We prewarp and align a specially designed projection pattern onto a printed pattern of different colorimetric properties. After capturing the patterns in several orientations, we perform geometric calibration by estimating the corner locations of the two patterns in different color channels. We perform radiometric calibration of the projector by using the information contained inside the projected squares. We show that our method performs on par with current approaches that all require separate geometric and radiometric calibration, while being more efficient and user friendly.
Design of calibration patterns
 |
 |
| Printed chart | Projected chart |
The projected pattern is specifically designed to allow for simultaneous geometric and radiometric calibration of the projector. The red pixel intensities (in %) of the squares vary across the chart. Example intensities are shown in the top-right corner. The printed pattern is composed of a conventional yellow-white checkerboard of identical dimensions to that projected. With this choice of colorants, we are able to isolate the two patterns in different color channels in the captured images.
Algorithm flowchart

Results
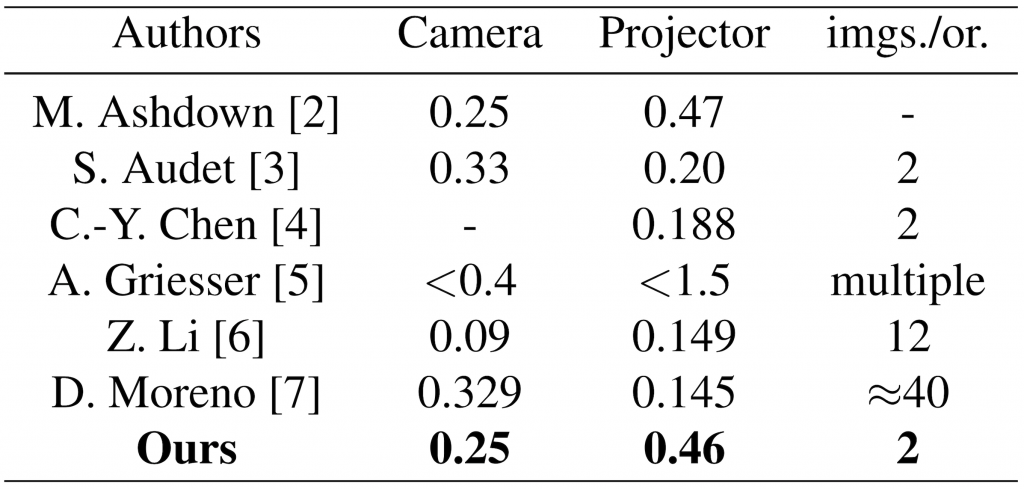
We capture 2 images per calibration board orientation and perform geometric and radiometric calibration at the same time, whereas other methods [2,3,4,5,6,7] perform only geometric calibration. This results in ample time savings.
 |
 |
 |
| (a) Non-gamma compensated patterns RMSE = 0.331 mm |
(b) Ground truth method* RMSE = 0.056 mm |
(c) Our method RMSE = 0.055 mm |
We perform a planarity test to validate the performance of the radiometric calibration in a real world scenario. The test consists of fitting a plane into a point cloud and estimating their fit. We therefore reconstruct a flat board by using a phase-shifting SL code. We perform three reconstructions of the flat surface, of size 10 x 10 cm, by projecting: (a) linear patterns, gamma compensated patterns with (b) gamma computed using a ground truth method*, and (c) gamma computed using our proposed method. Our method is vastly superior to (a), thus confirming the need for radiometric calibration. It is also faster and more convenient than (b), demonstrating the effectiveness of simultaneous geometric and radiometric calibration.
*11 consecutive projections of grayscale patterns of linearly increasing intensities.
References
[1] A. Geiger, F. Moosmann, Ö. Car, and B. Schuster, Automatic camera and range sensor calibration using a single shot. IEEE International Conference on Robotics and Automation, 2012.
[2] M. Ashdown and Y. Sato. Steerable projector calibration. IEEE Computer Vision and Pattern Recognition Workshop, 2005.
[3] S. Audet and M. Okutomi. A user-friendly method to geometrically calibrate projector-camera systems. IEEE Computer Vision and Pattern Recognition Workshop, 2009.
[4] C.-Y. Chen and H.-J. Chien. An incremental target-adapted strategy for active geometric calibration of projector-camera systems. Sensors, 2013.
[5] A. Griesser and L. Van Gool. Automatic interactive calibration of multi-projector-camera systems. IEEE Computer Vision and Pattern Recognition Workshop, 2006.
[6] Z. Li, Y. Shi, C. Wang, and Y. Wang. Accurate calibration method for a structured light system. Optical Engineering, 2008.
[7] D. Moreno and G. Taubin. Simple, accurate, and robust projector-camera calibration. IEEE 3D Imaging, Modeling, Processing, Visualization & Transmission, 2012.